
Problem statement:
Given start and goal configurations (possibly not deterministic) of a manipulation system, determine control inputs that will move the system from the start to the goal configuration.
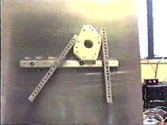
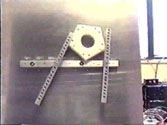
The distinction between "motion planning" and "manipulation planning" is that generally motion plannning problems do not involve contact, while manipulation plans cannot be accomplished without contact. Click on the images to see videos of manipulation plans executed by a simple planar hand capable of compliant control and contact state sensing. The hand's planner was based upon a quasi-static rigid body model. You'll notice that the manipulation of the pentagon is not quasistatic - it falls dynamically to achieve edge contact with the palm. Our planning algorithm failed on this task, since a quasistatic manipulation plan did not exist! We created this plan by hand.
|
|
|
|
Here are some papers describing the planning method: experimental results, planning method.
Here are papers relating to dexterous manipulation planning: liftability, frictionless stability, contact formation cells, stability cells, second-order stability cells, HKUST hand with experiment, enveloping grasping, friction-induced uncertainty