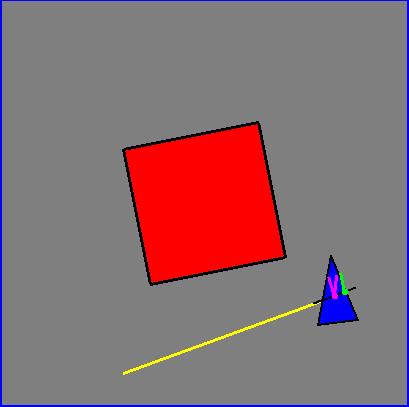
At the start, the magenta cone is drawn on top of the robot's true location and orientation.
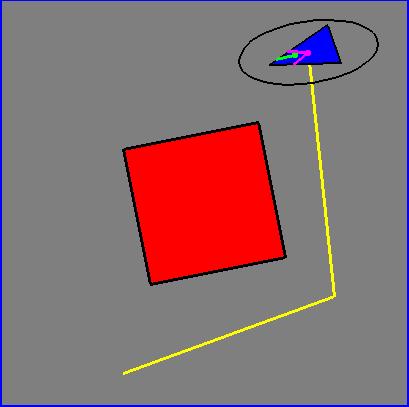
After the first motion, the position uncertainty is a one dimensional distribution because we knew the exact orientation at the start and because we assume that the robot moves in a straight line in its current heading with error only in distance.