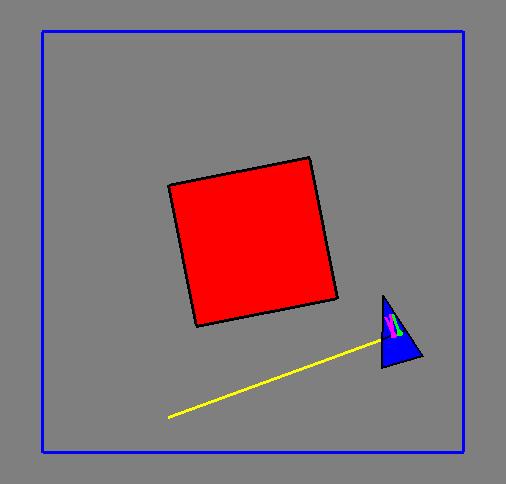
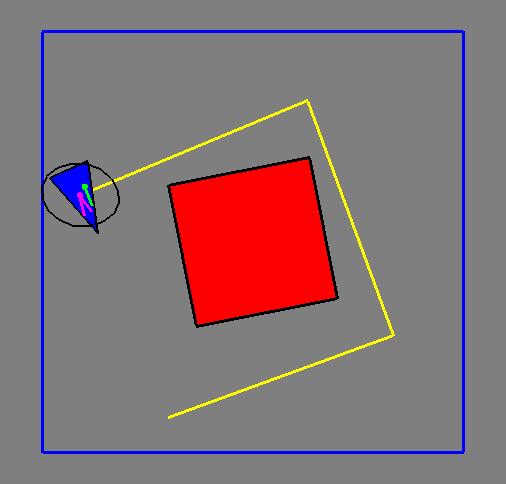
Also note that I've made the window slightly bigger than the world so that you can see the laser beam, even when it falls outside the world boundary.
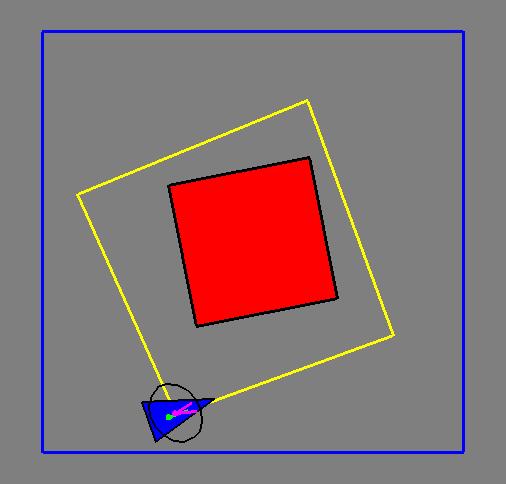
Initial starting configuration:
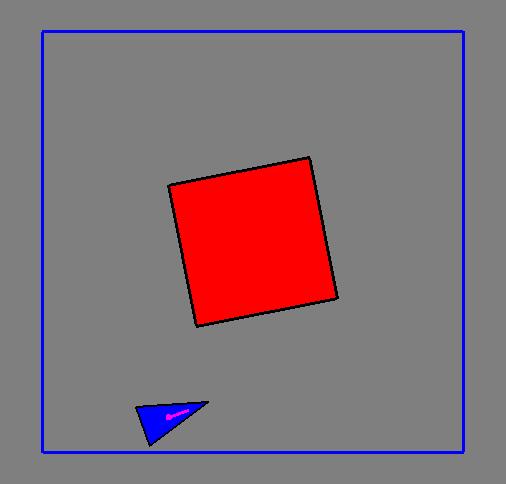
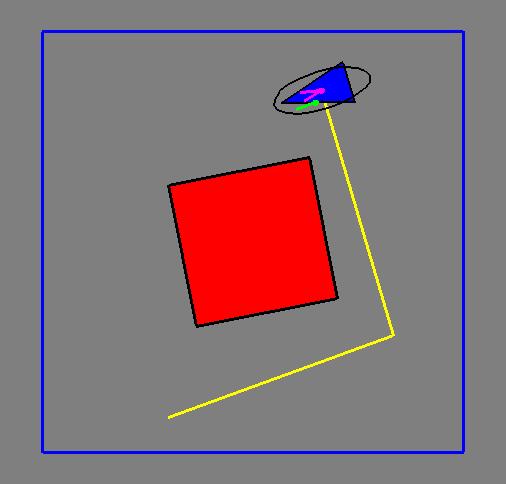
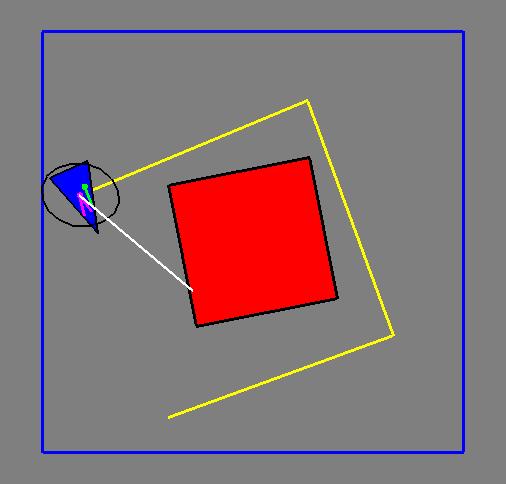
After first movement:
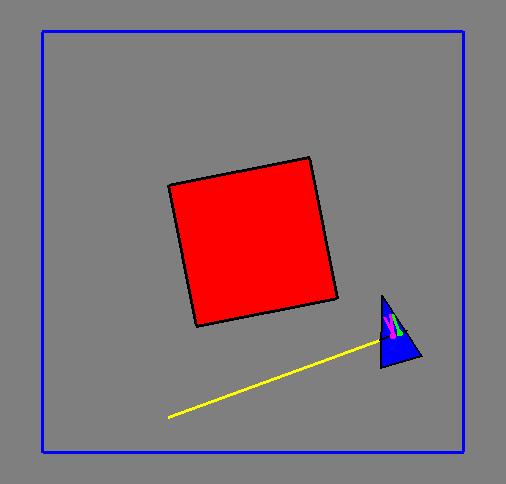
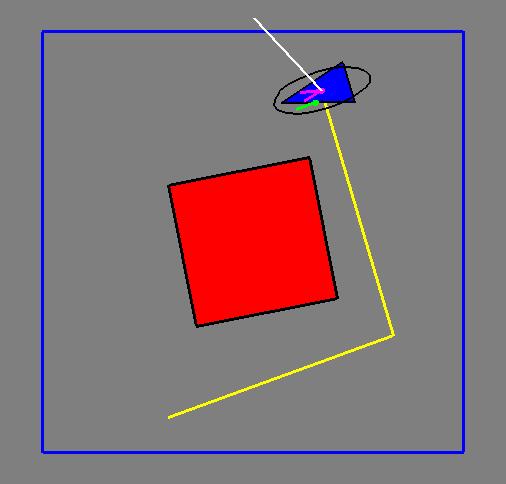
First laser rangefinder measurement:
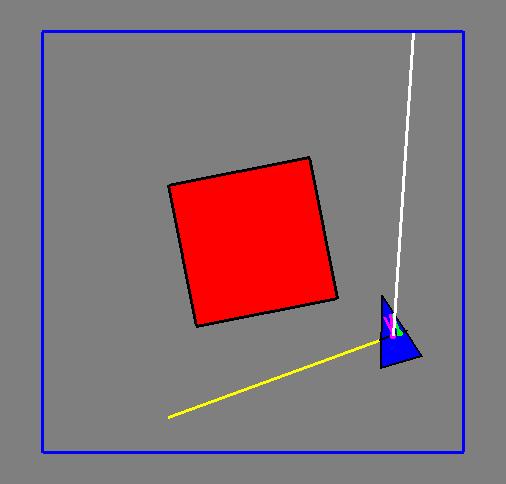
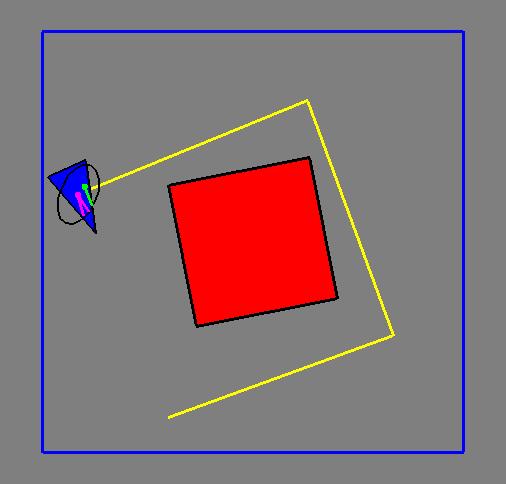
Corrected state estimate and covariance:
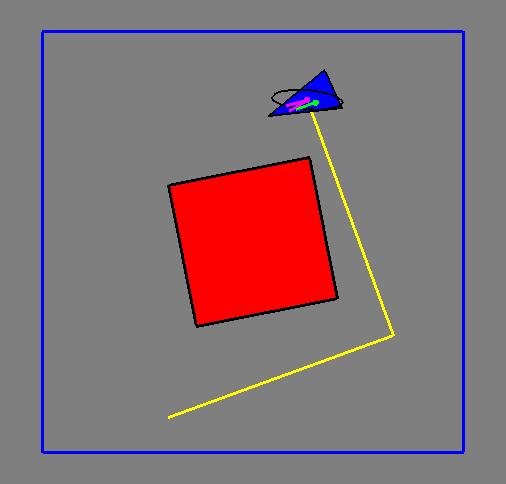
After second movement:
Second laser rangefinder measurement:
Corrected state estimate and covariance:
After third movement:
Third laser rangefinder measurement:
Corrected state estimate and covariance:
After fourth movement: