Toward High-Performance Computing Support for the Simulation and Planning of Robot Contact Tasks
Dates: June 27-28, 2011
Location: On the campus of the University of Southern California
Confirmed Speakers (click on names to see talk slides):
Abstract:
A key need in robotics is fast, accurate prediction of the result of manipulator actions involving intermittent contact (e.g., legged locomotion over rough terrain, grasp acquisition, multi-robot manipulation, and assembly). As the accuracy and speed of prediction increase, so will the robustness of open-loop manipulation plans that can be generated in a reasonable amount of time. In addition, for simple contact tasks for which super-real-time simulation is possible, model-based reactive control techniques become more attractive.
Goal 1 (Day 1):
Through oral and poster presentations and general discussions, we will assess the state of the art in contact modeling and simulation with discussion of current theoretical issues and applications needs arising in robotics, engineering, and gaming. (Click here to see the schedule.)
Goal 2 (Morning of Day 2):
Discussion groups will consider steps that could be taken to develop a state-of-the-art, open-source simulation and analysis tool to support the needs of the robotics community. Discussion will also cover topics related to implementation on modern computing hardware including GPUs and multi-core CPUs. (Click here to see the schedule.)
Outcomes:
A workshop report will be written and posted on this web page. In addition, if the recommendation of the workshop participants is to move ahead with the development of a simulation platform, then the organizers will seek funding to do so.
A Possible Future Simulation Platform:
A potential platform could be composed of a database of experiments with a suite of tools to manage and analyze the data, including experimental design, simulation, calibration, filtering, estimation, visualization, and optimization. Versions of the tool would be developed for various modern multi-threaded computing systems and RPI's 75 Tflop supercomputer. There would also be a technical support staff available 24/7/365.
Fast Collision Detection for Deformable Models:
We present a new approach to accelerate collision detection for deformable models. Our formulation applies to all triangulated models and significantly reduces the number of elementary tests between features of the mesh, i.e., vertices, edges and faces. We introduce the notion of Representative-Triangles, standard geometric triangles augmented with mesh feature information and use this representation to achieve better collision query performance. The resulting approach can be combined with bounding volume hierarchies and works well for both inter-object and self-collision detection. We demonstrate the benefit of Representative-Triangles on continuous collision detection for cloth simulation and N-body collision scenarios. We observe up to a one-order of magnitude reduction in feature-pair tests and up to a 5X improvement in query time.
|

|
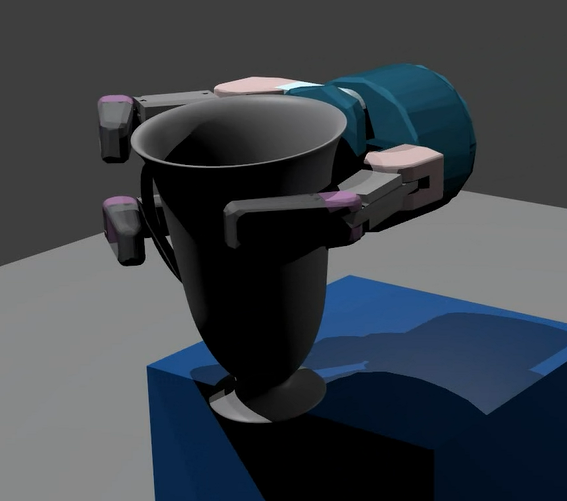
Grasp Acquisition:
Simulations of grasping problems like the one shown on the right can be quite difficult to perform quickly and accurately. The main problems are related to closed kinematic loops, stiff joint controllers, and obtaining correct contact information. The first two problems drive the simulation time step down to maintain integrator stability, but the last problem can cause integrator instability at essentially any time step. The video shown was obtained using the dVC3d physics engine and a modified version of Bullet collision detection inside Blender. The chalice and hand models have a total of about 5000 polygons. With time-steps of about 0.01 second, the simulation runs in real time on a core-i7 PC.
|
|
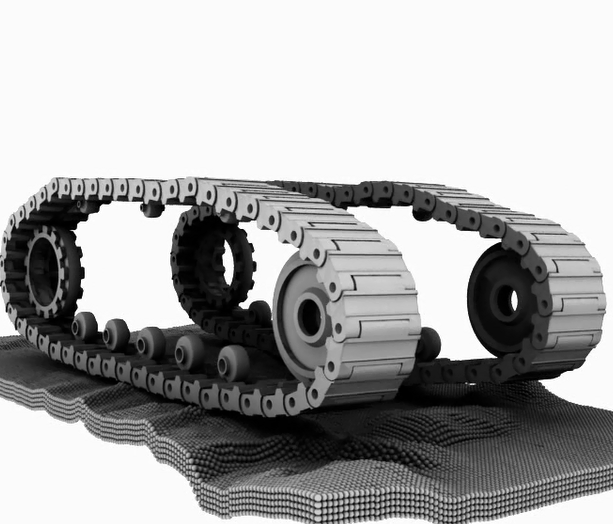
Traversing Terrain with Loose Stones:
Simulations like the one of the double-track on the right are difficult for several reasons. First, the size of the time-stepping subproblems grows linearly with the number of rocks. Second, vehicle components can have complex shapes, leading to a difficult collision detection problem that must be solved every time-step. Finally, the large differences in inertia properties between vehicle components and terrain particles can lead to poor accuracy. This simulation was performed in the Chrono::Engine physics engine using GPU computing for the collision detection and solution of the dynamics problem at each time step. With a time step of 0.005 second and 284,715 terrain particles, this 12 second long simulation took 18.5 hours on a machine with an NVIDIA 8800GTX GPU.
|
|
More Stuff:
Sponsor: National Science Foundation (CISE/CNS)
May 25, 2011